产品中心


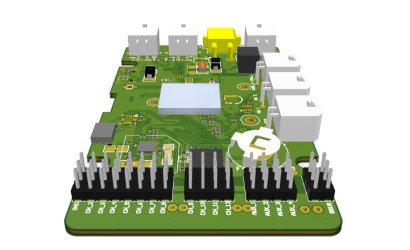
A4系列飞行控制与导航计算机:适用于小型电动、油动固定翼、倾转旋翼、多旋翼等飞行器
B7系列飞行控制与导航计算机:适用于各类多旋翼飞行器
XF20为标准款自动驾驶仪:持GNSS制导和吊舱导引两种方式,类型固定翼、多种类型任务航线
服务与支持
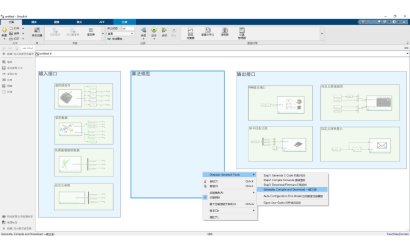
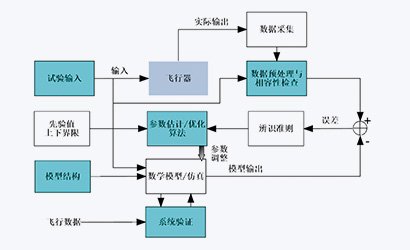
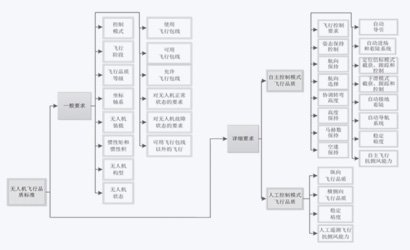
专业技术团队,军工研制背景,先进双V设计理念与MBSE工具,正向设计与验证流程保障,为客户提供专业、全面、高效的技术支持

设计与仿真服务
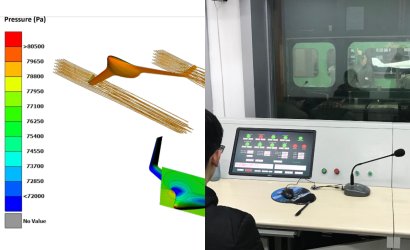
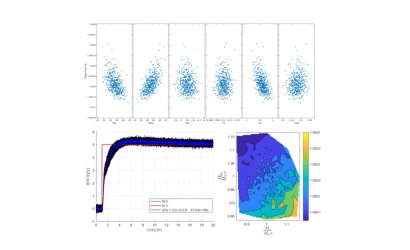
风洞试验和数据处理
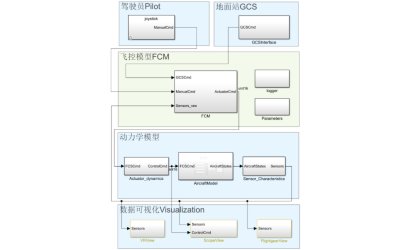
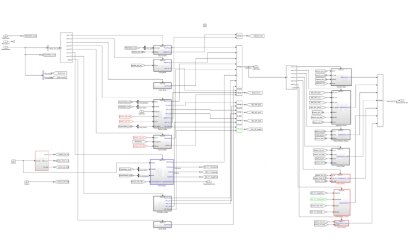
飞行器动力学建模
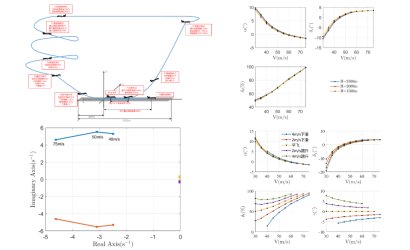
操稳特性与飞行性能分析
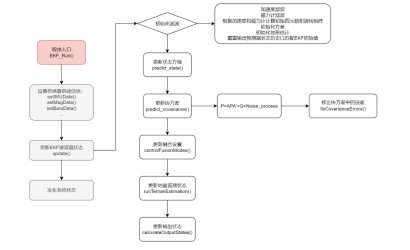
导航融合设计
制导控制设计
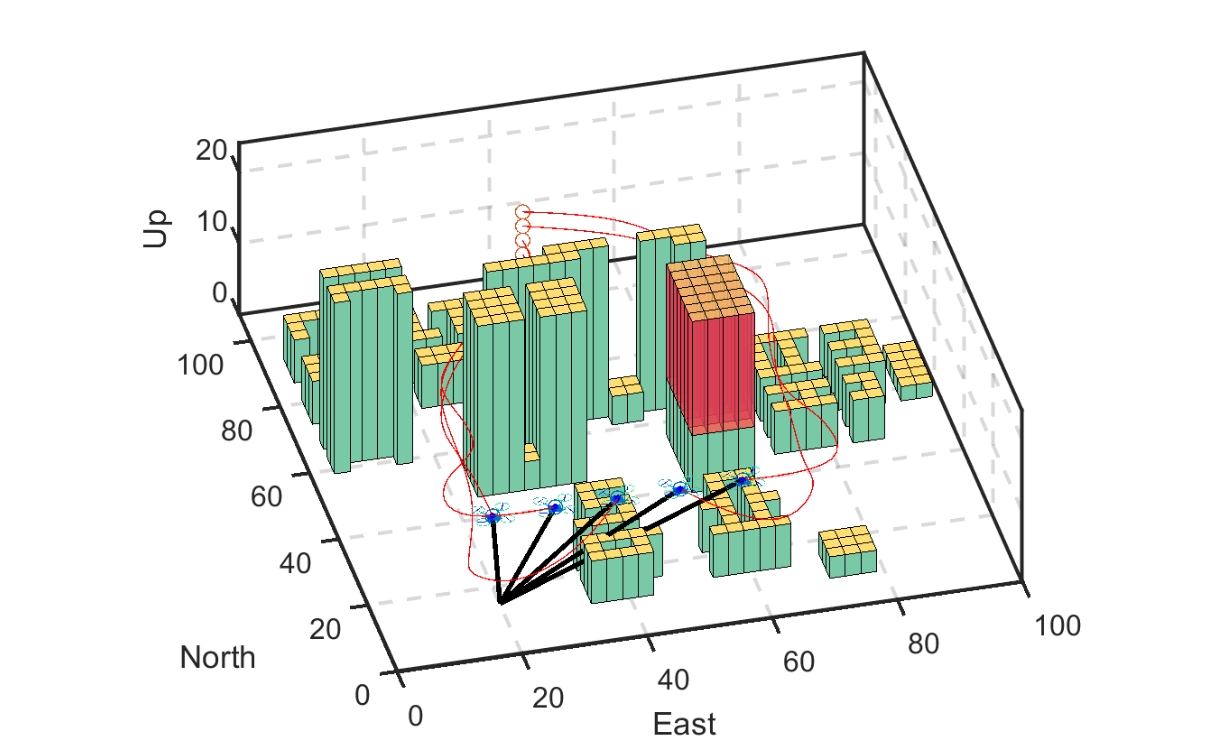
编队飞行控制
蒙特卡洛打靶仿真
软硬件开发服务
对外接口选配支持
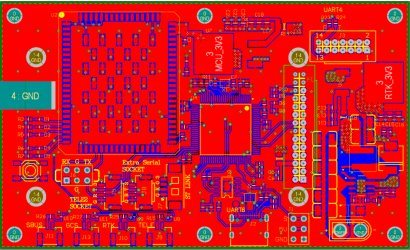
航电模块选配集成支持
应用层软件二次开发支持
支持
CAN、TTL、RS232、RS422通信
外设驱动开发服务
外接设备驱动开发服务
集成测试服务
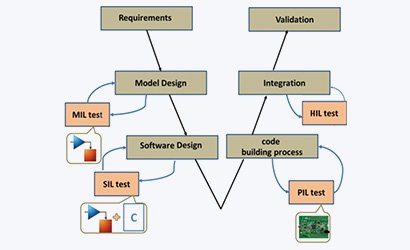
MIL、SIL、PIL、HIL测试支持

整机级半实物仿真试验支持

风洞自由飞试验支持
飞行试验服务

提供缩比验证整机支持方案
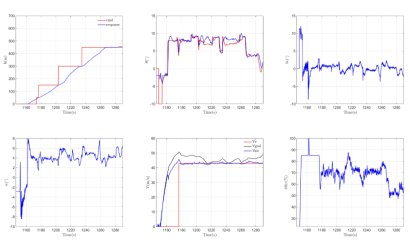
提供飞行试验数据分析服务
提供系统参数辨识服务
提供飞行品质评价服务
科研教育服务
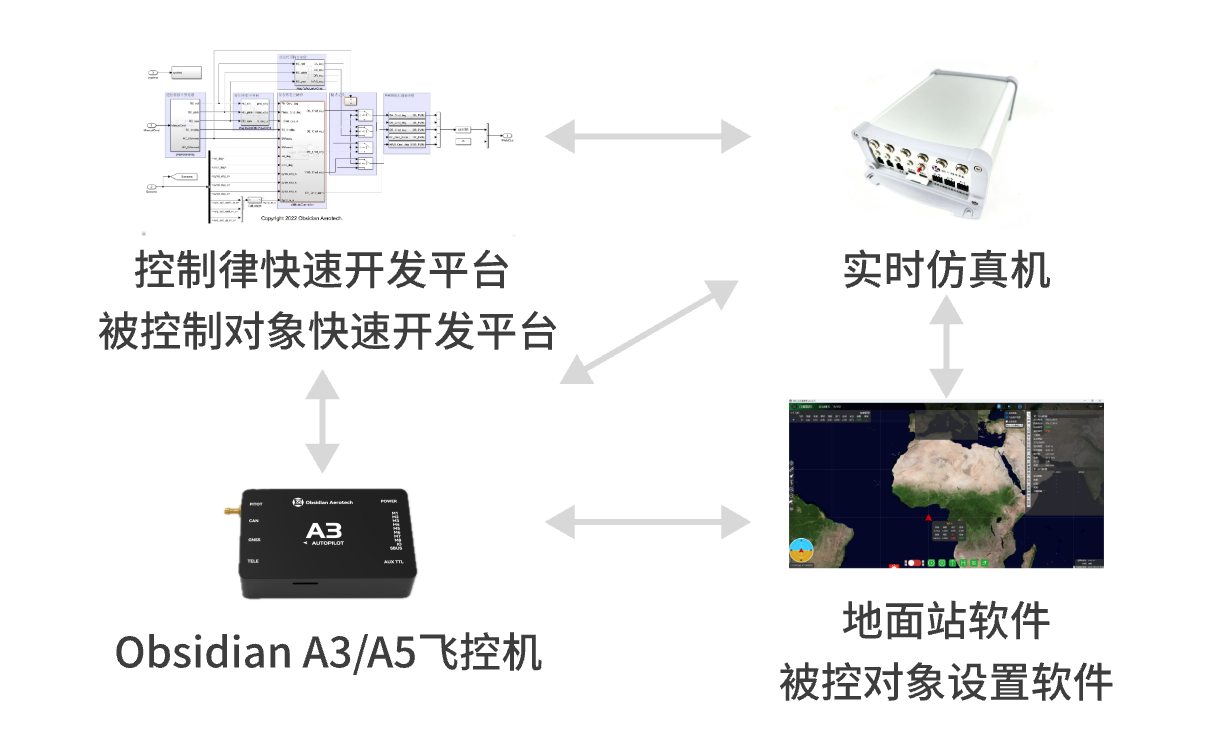
• OBS快速原型开发生态链支持
• 传感器、伺服机构、LOG记录、地面站回传数据
• 无人机飞行控制教学实践课程支持
• 仿真和飞行软件一致性保证
• 科研开发快速实现
• 产品功能开发快速验证
• 教育场景定制化支持
典型案例 - 固定翼篇

起飞前准备

起飞滑跑

前轮离地

稳定爬升
起落架收起
稳定转弯
返航进场

着陆接地

减速至停止
某200kg级固定翼无人机

弹射起飞

空中飞行

空中飞行

开伞降落
某弹射起飞无人机




分布式固定翼无人机项目



弹簧刀构型无人机项目



某大型倒V尾油动固定翼无人机




某大型油动双尾撑固定翼无人机
典型案例 - 垂直起降篇


某大型油动垂直起降无人机


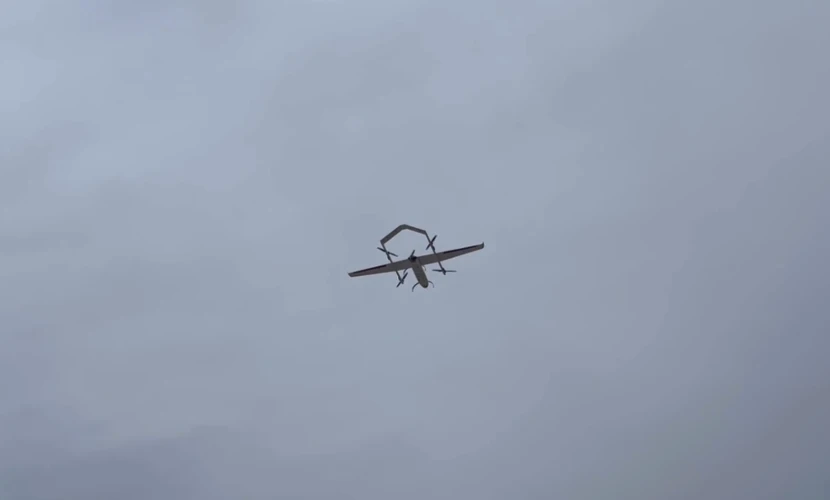
某纯电垂直起降无人机

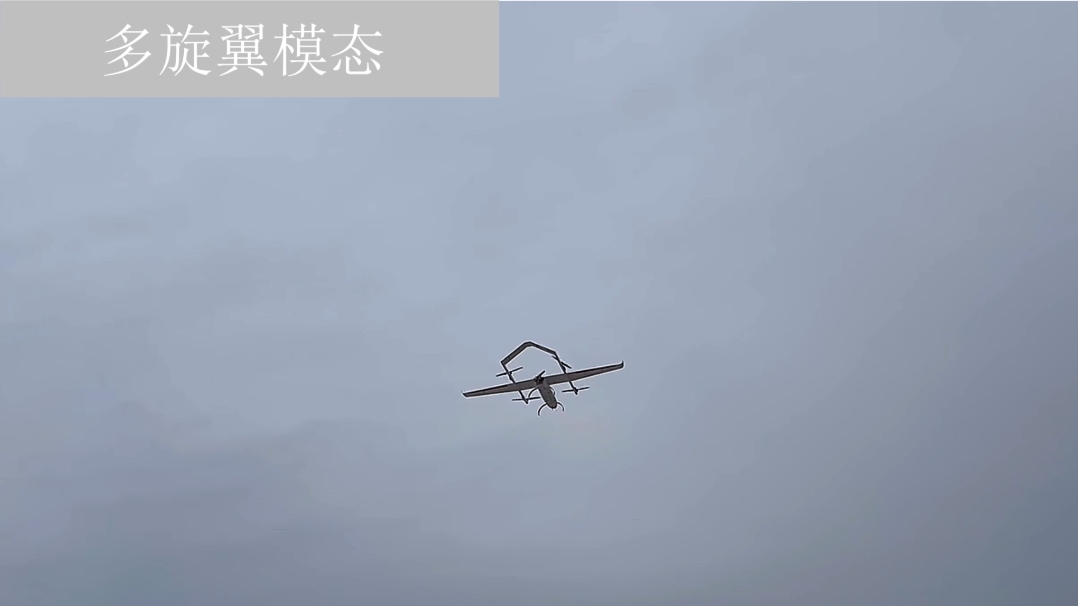
多旋翼模式

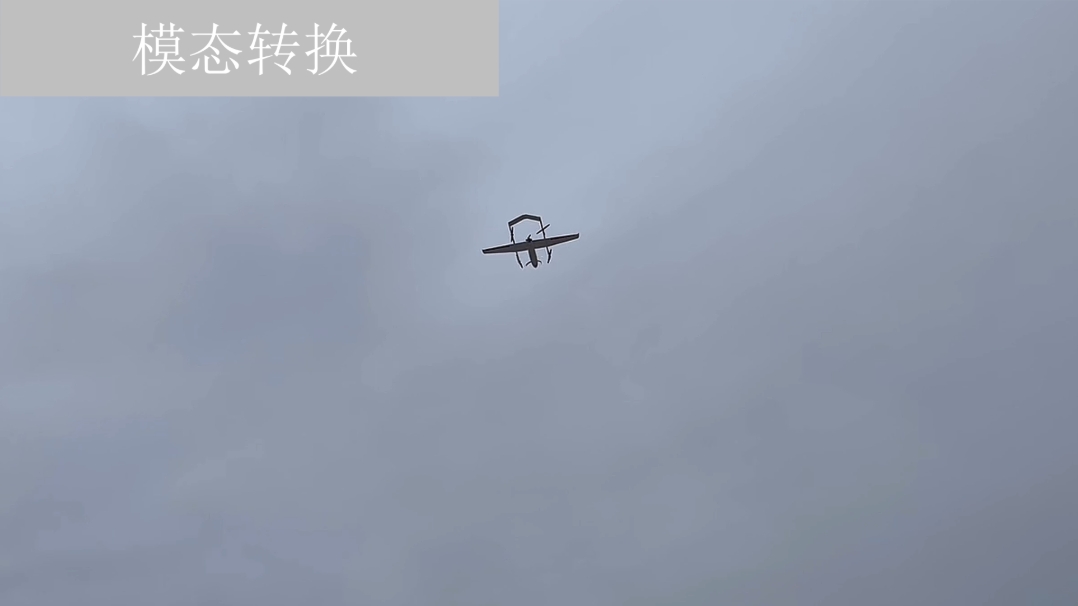
向固定翼模式过渡

固定翼模式

向多旋翼模式过渡
某倾转旋翼无人机


某复合翼垂直起降无人机
典型案例 - 多旋翼篇




某机巢项目

原理验证

交付前验证

交付验证
某移动平台起降项目

载重起飞

定点悬停

起飞

竖直喷水
大载重应用场景(吊运/光伏清洁)
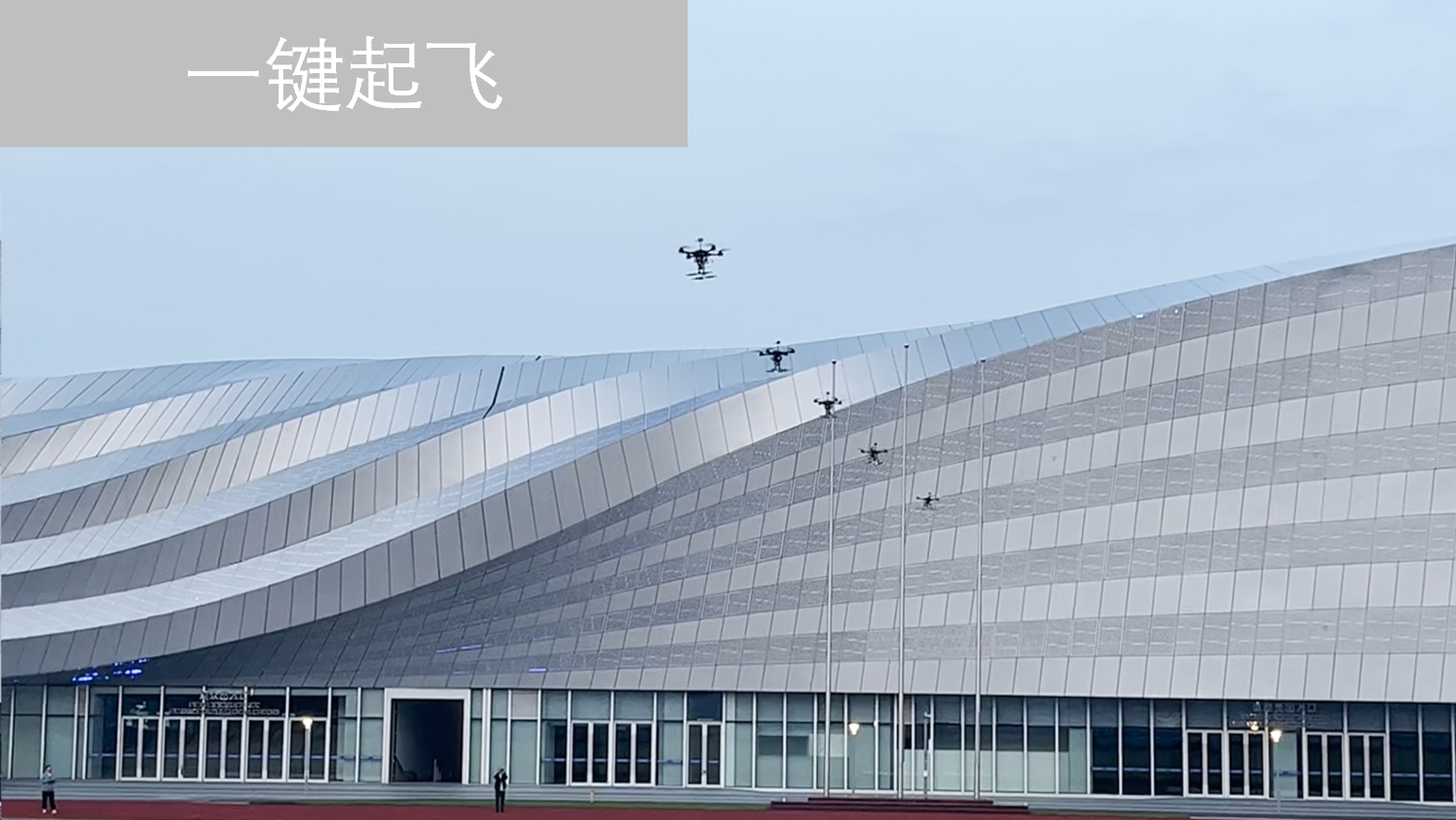



集群协同作战任务场景




大载重共轴六旋翼项目



消防应急救援-灭火弹精准投放
典型案例 - 特殊应用篇

某微型扑翼无人机项目

机翼战损容错飞行控制验证

车载起飞
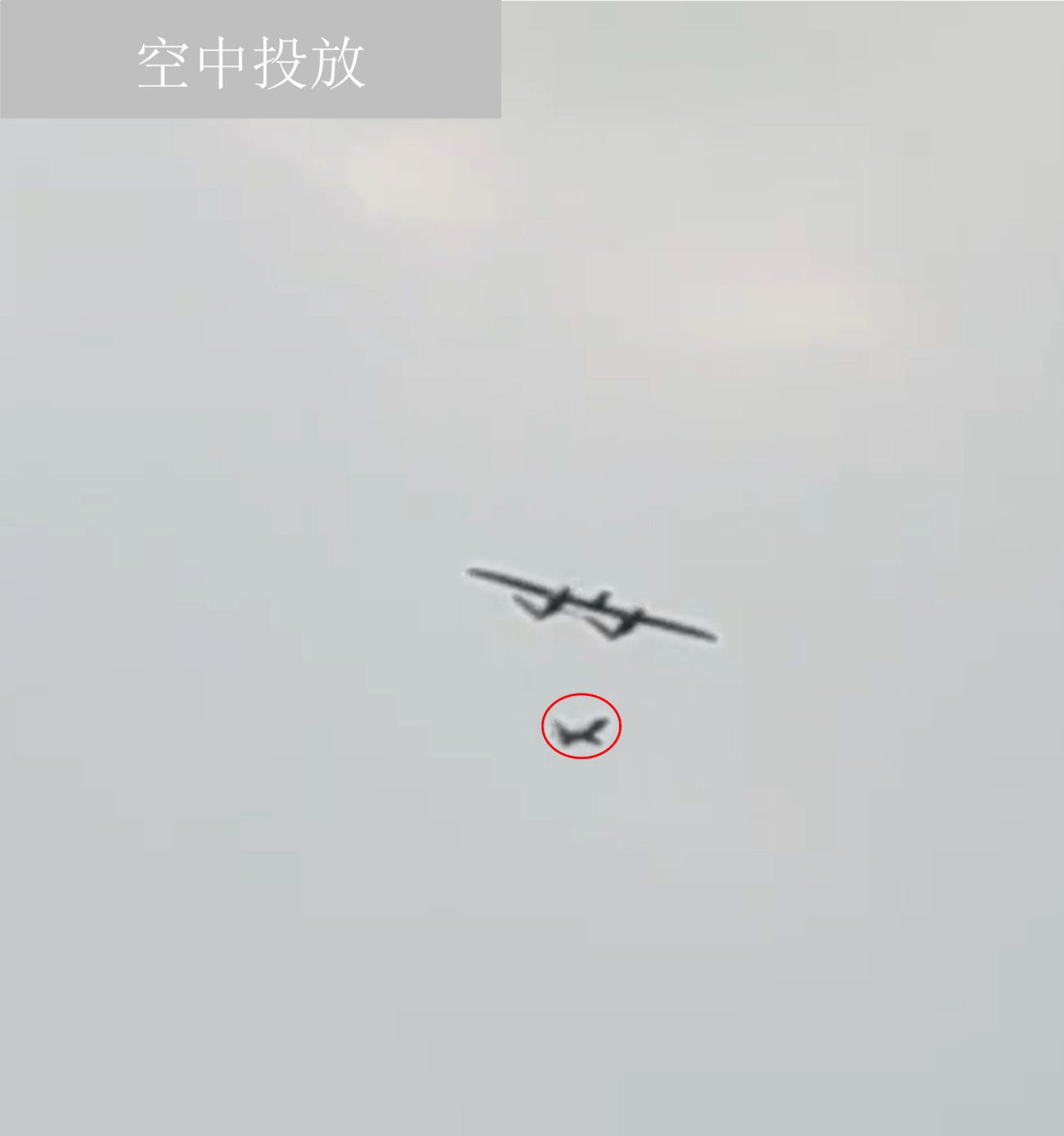
空中投放

巡航飞行
车载起飞与无动力投放分离
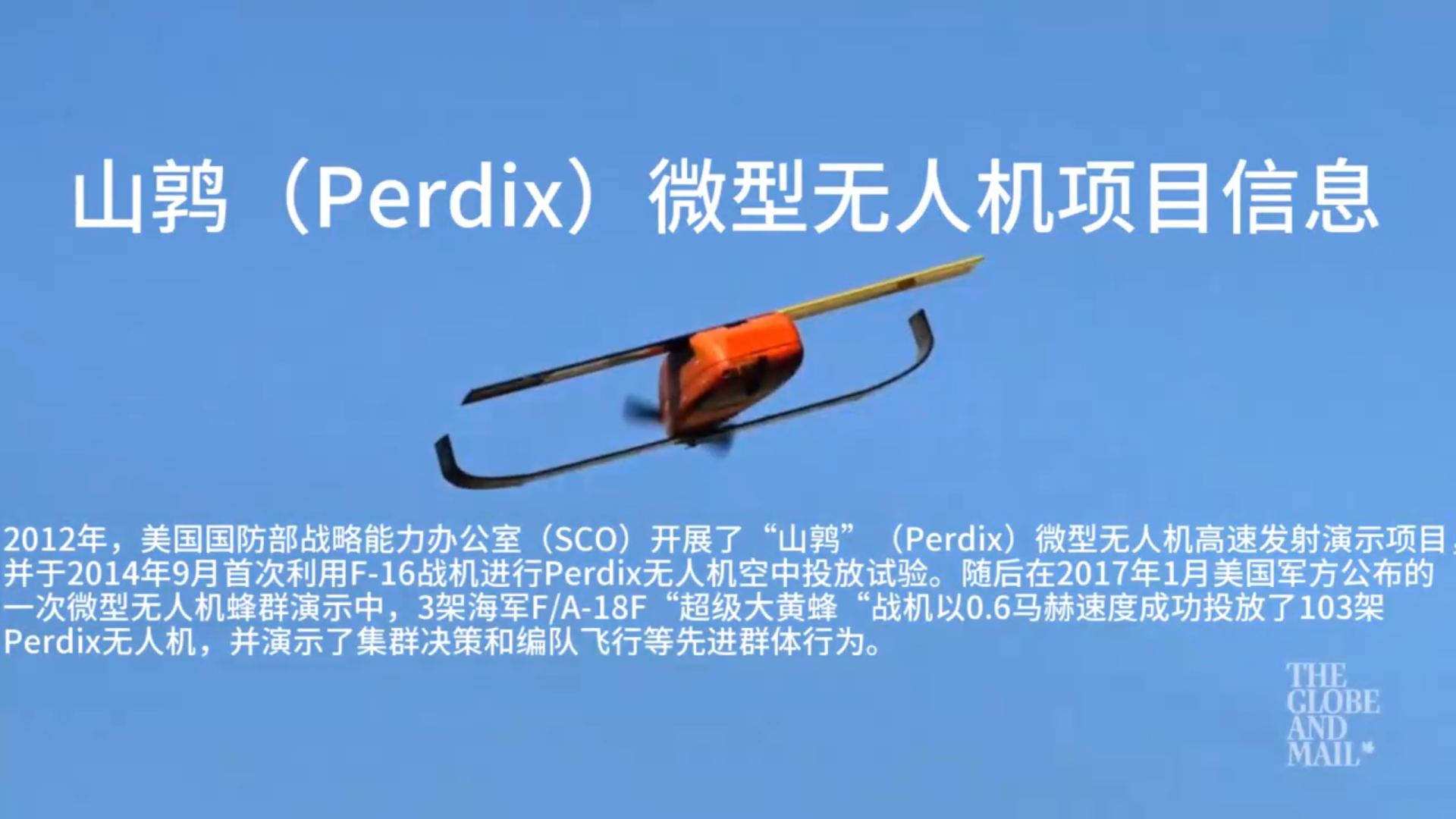
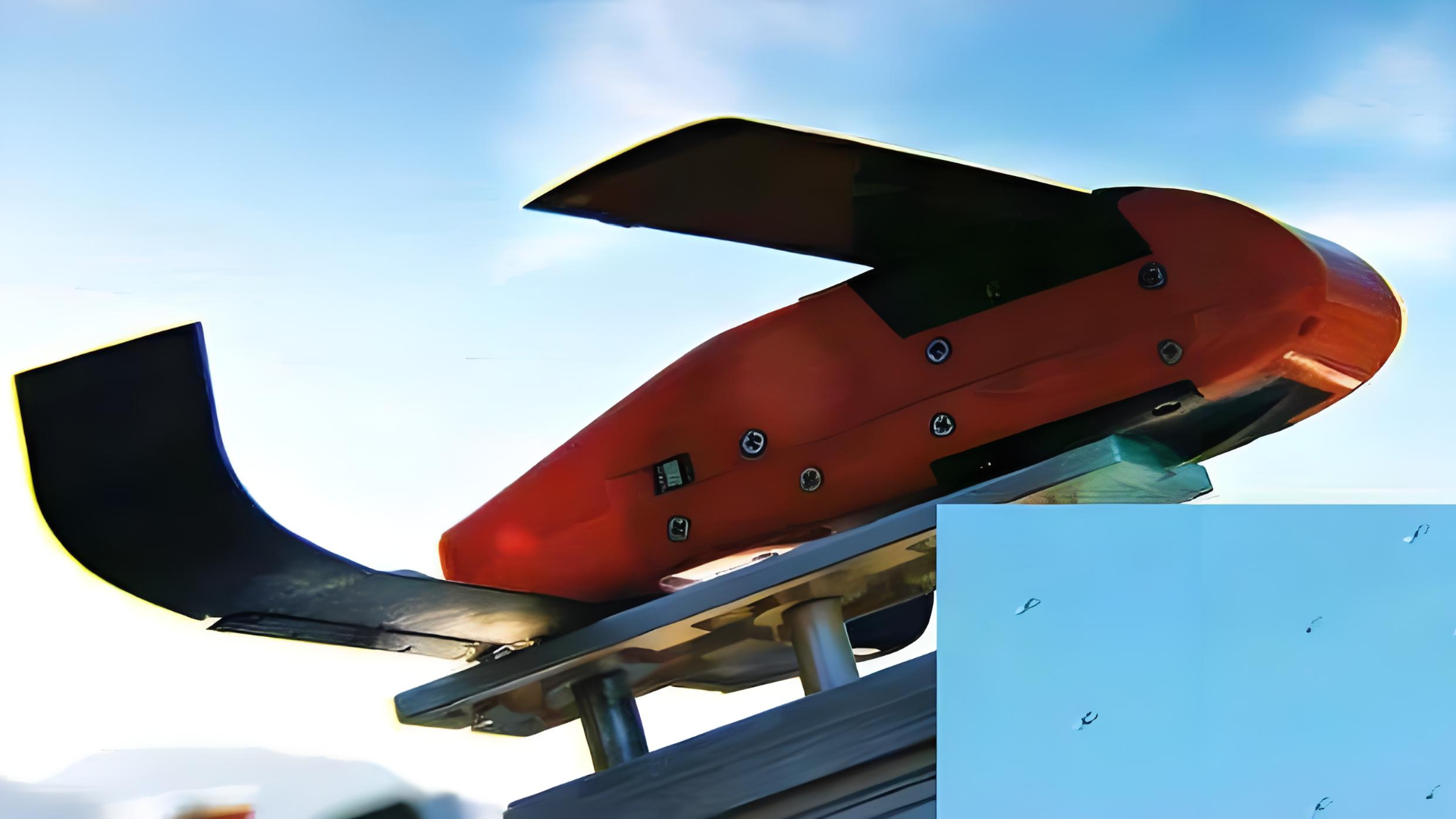


微型无人机
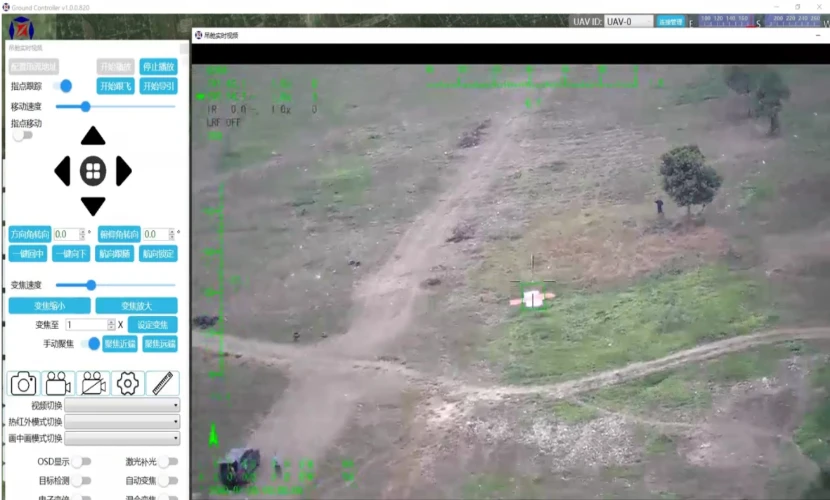
典型案例 - 巡飞导引篇




基于视觉的目标跟踪




基于视觉的目标导引(多旋翼)




基于视觉的目标导引(固定翼)


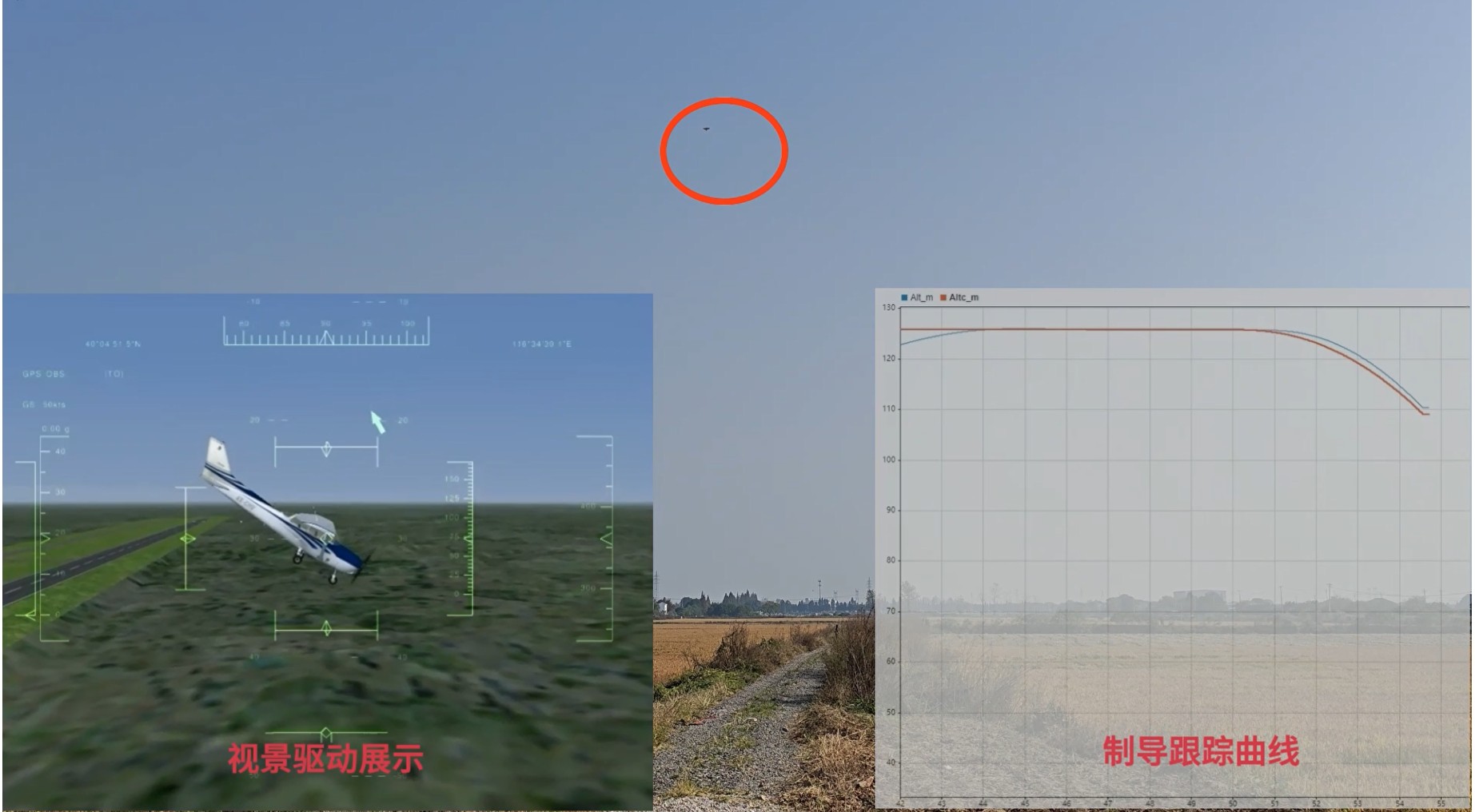

基于GNSS的目标导引





