PRODUCT CENTER
产品中心
产品中心


OBS飞控系统开发与半物理仿真平台
OBS飞控系统开发与半物理仿真平台,基于MBD开发,由正曜智控全栈自研,已入选浙江省重大科技成果。平台集成飞控机、仿真机、三自由度转台与高拟真三维实景系统于一体,覆盖MIL/SIL/PIL/HIL四级验证闭环,支持图形化算法开发、飞行中参数在线调优与复杂气象及风场环境模拟。可缩短50%+研发周期,降低实机测试风险,适配高校、科研院所、无人机企业等多场景。

缩短50%+
研发周期

降低实机
测试风险

适配高校
科研院所

支持无人机
企业等多场景

覆盖MIL/SIL/
PIL/HIL四级验证
单机半物理仿真系统
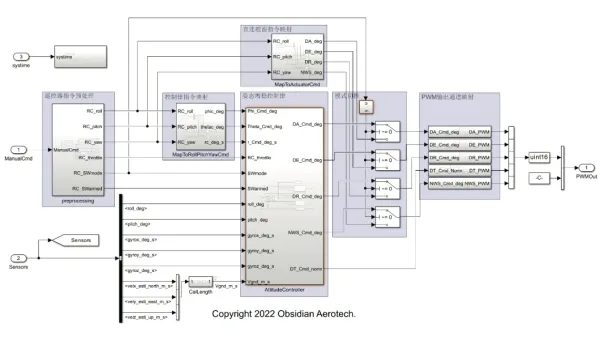
基于 MBD 飞控计算机
基于 MBD 仿真计算机—— 动力学模拟
三轴转台 —— 姿态模拟
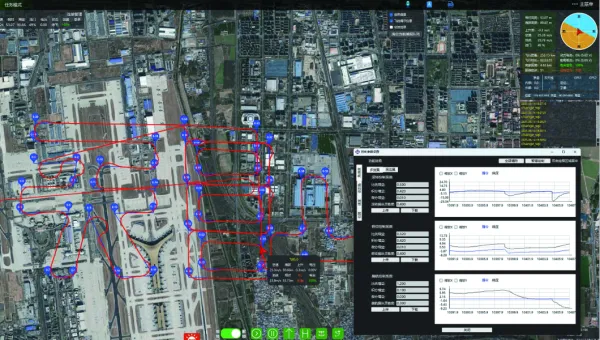
飞控地面站 —— 遥测控
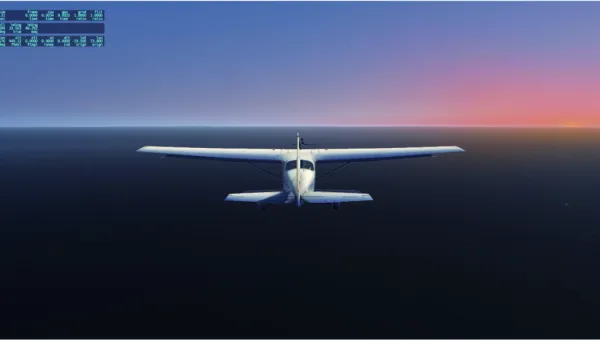
3D仿真视景
产品特点
高拟真三维视景
真实地形与气象数据库,CFD气动数据加载,真实动态反馈。
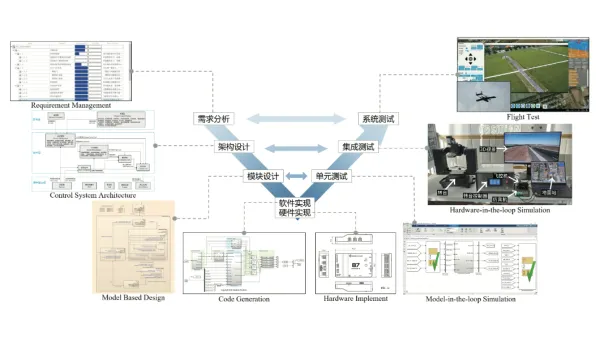
MBD开发流程
建模与代码自动生成,需求到验证完整闭环,研发周期缩短50%。
实时仿真架构
自定义飞行器模型与风场参数,转台与视景直连,一键重置与扰动注入。

飞行参数在线调优
PID等关键参数实时调整,仿真结果直映真实性能,极限条件安全验证。
MIL/SIL/PIL/HIL四级验证
全流程覆盖,逐级验证前置发现问题,降低测试成本。
集群仿真
支持集中式、多智能体协同、一站多机编队控制,算法开发验证一体。

